|
 |
 |
 |
 |
 |
|
| |
Intelligent Systems |
|
The
current researches of Robot group focus on the integration
of various robots, and we have been accomplished some relevant
researches as following:
1. Robot arms
2. Humanoid Robot
3. Mobile robot
4. Pipe Inspection Robot
5. 3-D laser ballbar system
6. Multiple-Soccer-Robot
|
Robot arms: |
The robot arms have been
developed for years. In addition to the precise robot arms
motion control, we have good achievements on the robot arms
grasping control and force feedback fields. In the recent
years, we devote to develop dexterous hand to apply on the
amputated patients.
The newest robot arm is shown in figure 1. There are six degree of freedom in the robot arm. We used six brushed DC Motors and Harmonic drive to reduce speed. Therefore, the angular speed is up to 110 deg/sec. The weight of arm is about five kilograms and the payload is about two kilograms. The distances it can reach are about 510mm。

figure 1 The newest robot arm
|
| Humanoid Robot:
|
About the research on humanoid robot, currently we focus on mechanism design and control algorithms. In order to achieve human-robot interaction and the interaction with environment, the robot arms and the robot hands are equipped with force sensors. With the feedback from the force sensors, we can protect the humans from being hurt by the robots. The robot hands and robot arms are shown in Figure 1 and Figure 2.
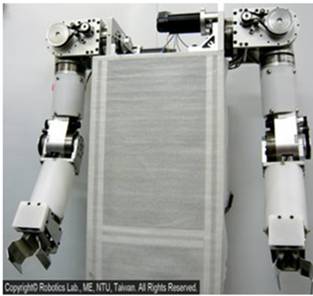 |
Figure 1 The robot arm in our robot |

|
Figure 2 The robot hand in our robot |
Figure 3 shows robotic hand was designed three-fingered in our lab, the robotic hand has three active degrees of freedom and five passive degrees of freedom, with three brushed DC motor, power is transmitted to each finger by using steel wires, the robotic hand is capable of grabing simple shape of the object.
|
Figure 3 The three-fingur robot hand in our robot |
About the trajectory planning of humanoid robot, the relationship between the center of gravity (COG) and the zero moment point (ZMP) on the footpad of the robot is used to construct the inverted pendulum model in order to generate stable walking patterns. Figure 3 shows the COG and ZMP when the robot walks.
|
Figure 4 COG and ZMP when the robot walks |
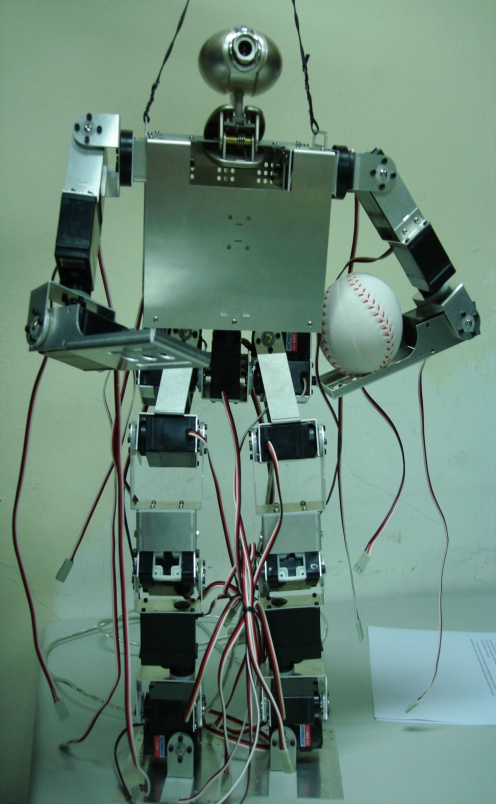
Figure five shows a small-sized humanoid robot using RC motor, there are four force sensor on the bottom of the foot that can get force data and send the data to MATLAB Simulink and then we can estimate the zero moment point (ZMP) of the robot. By using the inverten pendulum model, we can find the trajectory of the center of gravity (COG) of the robot. After solving inverse kinematics with the COG trajectory, we can control the robot in ADAMS through the MATLAB Simulink.
|
Figure 5 The small-sized humanoid robot |
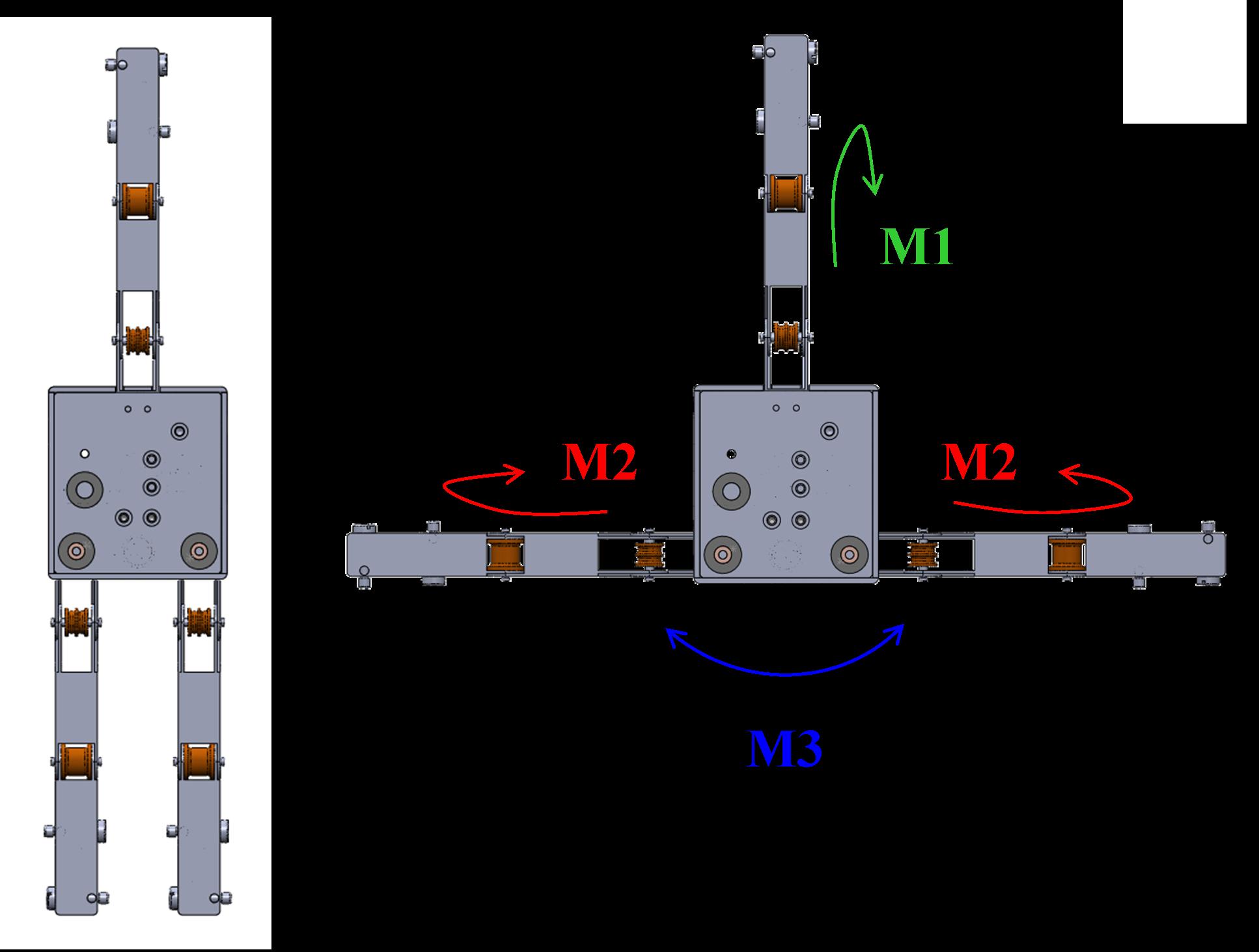
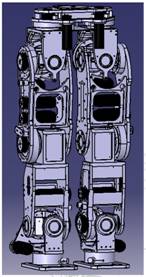
About the mechanism design of the robot legs, the CATIA and Solidworks are used to complete the mechanism design and the stress analysis. The main purpose to do the stress analysis is to find the weak parts on the mechanism. Thus we can find the weak points before we manufacture the mechanisms. This can reduce the development time and the cost of the mechanisms. The robot legs are shown in Figure 6.
|
Figure 6 Mechanism design of the robot legs |
Future works:
In order to make the robot can adapt the human world better and have more benefit to humans; we will focus on the technology on whole-body coordinate control and human-robot interaction.
|
| Mobile robot: |
Mobile robot group mainly dedicates to developing the new techniques on mobile robots. Currently we target the following research topics.
SLAM (Simultaneous Localization and Mapping)
The robot incrementally perceives the information of surroundings with on-board sensors. SLAM algorithms helps robot to further localizes itself and reconstructs the map of the environment. The developed algorithms include RAMF (Relative-Absolute Map Filter), RASLAM (Relative-Absolute SLAM), SLAMMOT-SP etc.
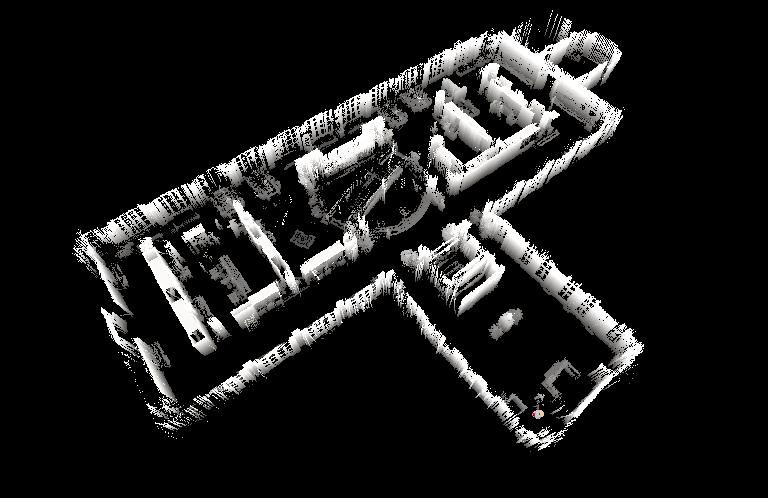
Using two laser range finders are equipped in a mobile robot platform to collect the geographic information, and then to build the environment model. Figure one shows the NTU history gallery by 2.5D mapping. A human-friendly service robot can use the map to provide assistance in the NTU history gallery.
|
Figure 1The 2.5D map for NTU history gallery |
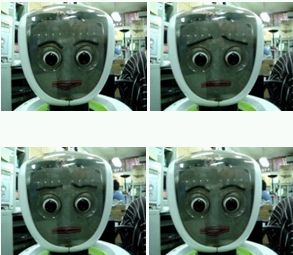
At the same time, the robot will change the face expression and interact with people. Figure two shows robot's face expression - happiness, anger, depression and gladness.
|
Figure 2 robot's face expression |
Navigation
One of the most fundamental techniques of mobile robots is navigation. The robot is required to travel the environment and arrived at the destination without collisions. Currently the proposed algorithms address on the requirements of anytime, fast replanning, and the uncertainty concern. The developed algorithms include DAO*, DDAO*, predictive anytime A*, predictive anytime RRT etc.
Pedestrian Modeling
In the near future, more and more robots will appear in our human society. To make the robots smoothly co-exist and share environments with humans, the key issue is to understand the behavior of humans. Furthermore, the robot should behave in a manner that is easily understood and socially acceptable, thereby minimizing distress for the people around them. We presented several frameworks to model the behaviors of pedestrians. That includes motion primitive modeling, SBCM (Spatial Behavior Cognition System), PEG (Pedestrian Ego-Graph).
Exploration
In order to make the robot automatically reconstruct the map of the environments, an appropriate exploration policy is necessary. We developed the multi-robot exploration system to efficiently explore the unknown environments under limited communications.
Patrol
For security robots or service robots, the robots are usually required to travel through the certain locations. The patrol algorithm provides the optimal policy to travel all the assigned places at the shortest period. We presented the patrol algorithm on multi-robot system to efficiently shorten the time period of patrol. It is also capable of adjusting the patrol policy under the situations of emergency events.
|
| Pipe Inspection
Robots:
|
Pipeline systems are widely
used in industry now. We developed a new pipe inspection
robot with GUI control panel(NTU-Navigator).The robot can
be easily controlled by using the GUI on PC. NTU-Navigator
can return the message that record the state of pipeline.
|
| 3-D laser
ballbar systems: |
To calibrate the industrial
robot arms, a 3-D laser ballbar system is developed to measure
the spatial coordinate in real time.
|
| Multiple-Soccer-Robots:
|
In order to dynamically
cooperate multiple robots, this dissertation developed a
multiple-soccer-robot system --- NTU-Formosa. The objective
is to make multiple robots work efficiently in an unknown
and dynamic environment. We proposed a complete software
structure greatly increasing feasibility and practicality
for developing multi agent/robot coordination control. As
for AI, in order to achieve cooperation, we use a hierarchical
architecture. Coordination and cooperation are also achieved
through communication and interaction. Real-time visual
servoing systems are developed for tracking moving objects
in two-dimension space. |
| |
|
|