|
The current research direction of the human-robot interaction group focuses on developing a robotic cognitive framework and emphasizing the interaction between humans and robots. Additionally, the group conducts research in biomedical engineering, which includes developing human brain cognitive prediction models and applying machine learning and feature engineering to analyze electroencephalogram (EEG) signals.
Service Robot MOBI:
The service robot MOBI, developed by our laboratory, is based on the Dashgo Smart platform, extending upward to include battery, computer equipment, and arm layers, and finally connecting to the head. The head of MOBI uses a 2-degree-of-freedom design, while the arm adopts a 6-degree-of-freedom design to mimic a human hand. The end effector can be equipped with custom fixtures or the humanoid hand palm designed and developed by our laboratory. Communication is achieved using both EtherCAT and RS232, enabling real-time operation and control. Overall, the hardware of the MOBI robot was designed by our laboratory, outsourced for manufacturing, and then assembled and tested in-house.
The hardware of MOBI includes the platform, arm, hand, head, panels, dual-depth cameras, and the outer shell. The software is divided into modules for the head, arm, hand, platform, and brain. For the head, arm, and hand, the communication control for the motors is integrated into the laboratory's Robot program, where algorithms are developed. On the other hand, the platform's mapping and navigation are controlled via the ROS framework, while the brain incorporates a custom-built learning model that enables the robot to recognize human behavior and emotions.

Figure 1: The service robot MOBI.
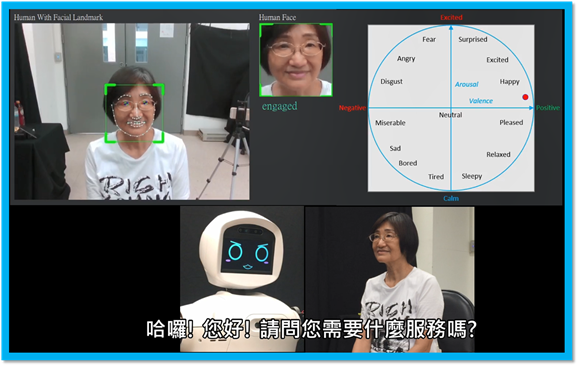
Figure 2: The control interface demo of MOBI.
Video Robot MOBI-mini:
Based on the design of the MOBI robot, our laboratory has developed a lightweight robot, MOBI-mini, equipped with a camera, speakers, and a microphone. It is capable of expressing emotions and body movements, making it suitable for human-robot interaction and dialogue research. MOBI-mini is powered by a robot cognitive system driven by a large language model, enabling it to possess both long-term and short-term memory capabilities, effectively responding to user statements and demonstrating a high level of interactivity.
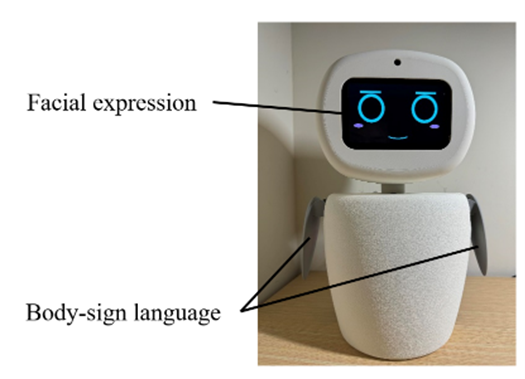
Figure 3: The video robot MOBI-mini.
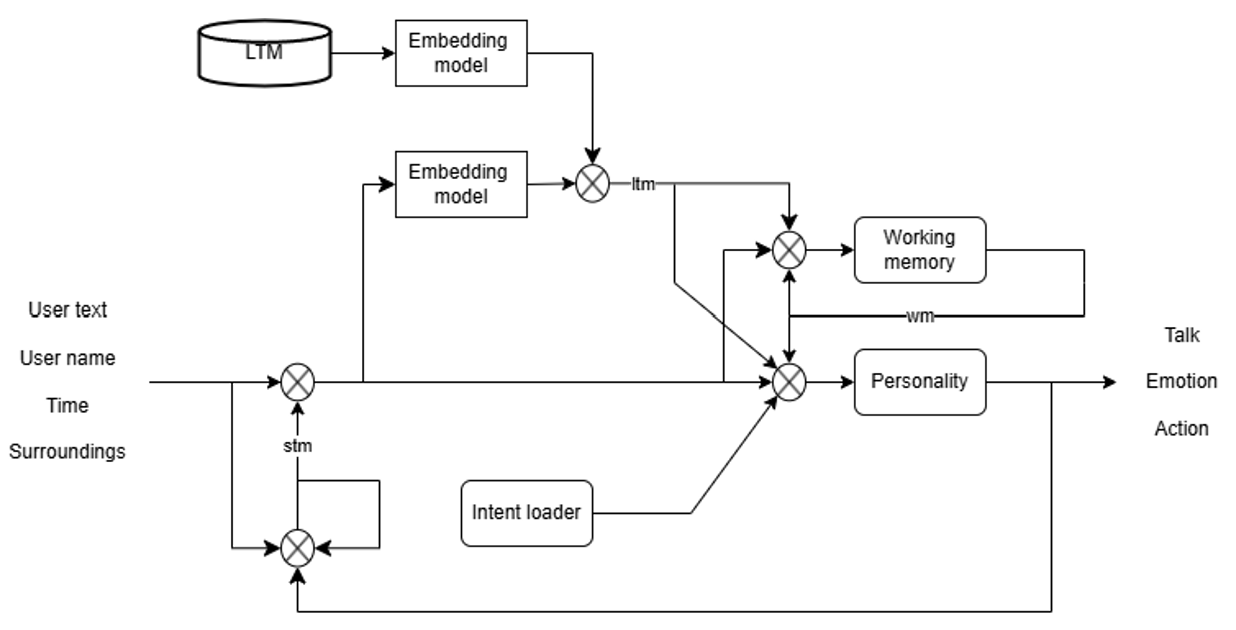
Figure 4: The control architecture of MOBI-mini.
Working Memory Statistical Model:
Our laboratory has proposed a working memory statistical model to analyze electroencephalogram (EEG) signals for identifying the usage of working memory. Additionally, we introduced a knowledge-based fuzzy support vector regression (KB-FSVR) model that combines the statistical model with machine learning, effectively predicting human working memory performance from EEG signals.
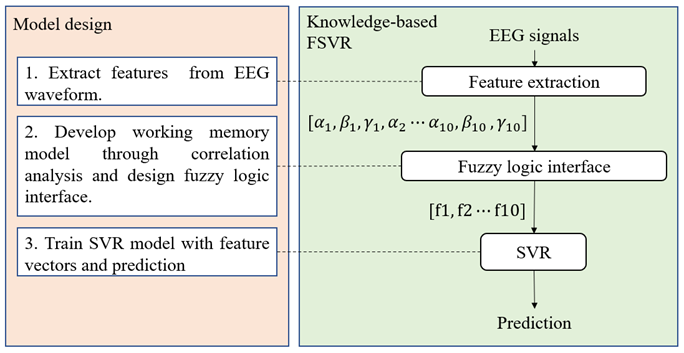
Figure 5: The design and architecture of the working memory statistical model developed by our laboratory.

Figure 6: Analysis results of the working memory statistical model.
Cognitive Function Assessment for the Elderly:
Our laboratory, with the goal of developing human brain models, focuses on assessing cognitive abilities in the elderly and establishing a cognitive aging model. We have completed the collection of EEG signals from participants across various age groups (mainly between 50 and 90 years old), along with data from numerous tests, including the MoCA (Montreal Cognitive Assessment). For the statistical data from the MoCA test, we have proposed a cognitive hierarchy of dementia model, as shown in Figure 7. Currently, we are conducting various statistical analyses on EEG signals, time-frequency feature extraction, signal processing, and machine learning model training to identify features associated with cognitive aging, and to develop corresponding models for assessing an individual's cognitive status.
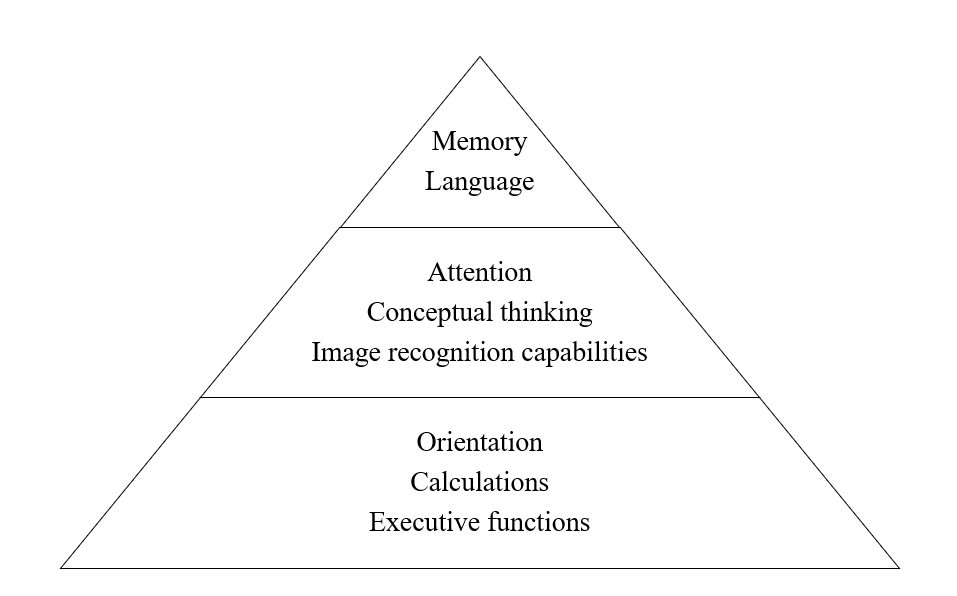
Figure 7: The design and architecture of the cognitive hierarchy of dementia model developed by our laboratory.
|